اتوماسیون صنعتی
اتوماسیون صنعتی شامل سیستمهای PLC، DCS، FCS و ...اتوماسیون صنعتی
اتوماسیون صنعتی شامل سیستمهای PLC، DCS، FCS و ...نظرسنجی
علاقهمند به کدام یک از شاخههای زیر میباشید؟
برگهها
- کتاب WinCC
- چاپ کتاب پروژههای پیشرفته PLC و WinCC
- تالیفات مهندس فرجی
- سوابق و رزومه کاری، تدریس و تالیفات مهندس فرجی
- دانلود مقالات، فایلها و نرمافزارهای مفید
- دورههای آموزشی اتوماسیون صنعتی
- دوره PLC S7 Siemens سطح مقدماتی
- دوره PLC S7 Siemens سطح پیشرفته
- دوره WinCC مقدماتی
- دوره WinCC پیشرفته
- دوره Profibus
- PID کنترل
- برنامهنویسی به زبان SCL
- دوره برنامهنویسی به زبان Graph
- کتاب گراف
- کتاب پروژههای PLC
- کتاب مرجع PLC مقدماتی
- کتاب مرجع PLC پیشرفته
- تماس با مهندس فرجی
- تصاویر دورههای آموزشی مهندس فرجی
جدیدترین یادداشتها
همه- راه اندازی وب سایت مهندس فرجی
- گروه اتوماسیون صنعتی
- گروه اتوماسیون صنعتی
- [ بدون عنوان ]
- کتاب کاملترین مرجع کاربردی PID Control در صنعت
- چاپ "دوم" کتاب مجموعه پروژههای پیشرفته PLC و WinCC
- [ بدون عنوان ]
- چاپ ششم (ویرایش دوم) کتاب پروژهها
- چاپ 4 (ویرایش دوم) کتاب WinCC
- چاپ جدید کتابهای WinCC و پروژههای PLC
- دانلود فیلمهای آموزشی مهندس فرجی
- درباره وبلاگ
- اخبار جدید
بایگانی
- خرداد 1396 1
- بهمن 1394 1
- مرداد 1394 1
- بهمن 1393 1
- آبان 1393 1
- مهر 1393 1
- مرداد 1393 1
- اردیبهشت 1393 1
- فروردین 1393 1
- اسفند 1392 1
- آذر 1392 1
- اردیبهشت 1392 2
تقویم
خرداد 1396| ش | ی | د | س | چ | پ | ج |
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 | 31 |
جستجو
آمار : 77041 بازدید
Powered by Blogsky
کتاب "کاملترین مرجع کاربردی PID Control در صنعت
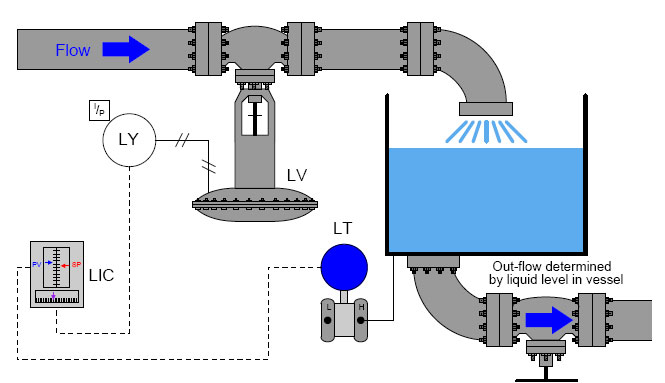
انواع سیستمهای صنعتی را میتوان به دو گروه حلقه باز و حلقه بسته تقسیمبندی نمود. در سیستم حلقه باز هیچگونه فیدبکی از فرآیند(پروسه) دریافت نمیشود ولی در سیستم حلقه بسته، مقدار کمیت فیزیکی تحت کنترل به عنوان فیدبک به سیستم کنترل ارسال میشود. به منظور کنترل سیستمهای حلقه بسته، روشهای مختلفی ارائه شده است که پرکاربردترین آنها، روش PID است. در این روش ابتدا مقدار اختلاف بین Set Point و فیدبک (PV) محاسبه میشود. این کمیت به نام Error شناخته میگردد. سپس مقدار Error در ضریب تناسب ضرب شده، انتگرال و مشتق آن گرفته میشود. PID مخفف Proportional Integral Derivative بوده و اشاره به همین متد کنترلی دارد.
مطالب بیشتر در کتاب
"کاملترین مرجع کاربردی PID Control در صنعت"تالیف مهندس فرجی از انتشارات نگارنده دانش
به زودی